GRMS一维河网模型
0. 前言
GRMS 一维河网模型采用有限体积方法求解 Saint-Venant(圣维南)方程组,有限体积方法基于积分格式,求解计算过程能够保证守恒性。方程组求解过程中采用 Hancock 预测-校正两步保证时间二阶精度,采用 MUSCL 线性插值保证空间二阶精度,通量计算采用 HLL 近似 Riemann 解。模型具有良好的激波捕获能力,能够模拟溃坝波以及复杂地形条件下的水流运动过程,对临界流、亚临界流、超临界流等各种流态转变过程均具有良好的模拟效果。
1. 控制方程
描述天然河网一维浅水流动的 Saint-Venant 方程组的向量形式如下:
D ∂ U ∂ t + ∂ F ∂ x = S (1)
\pmb{D}\frac{\partial \pmb{U}}{\partial t} + \frac{\partial \pmb{F}}{\partial x} = \pmb{S}
\tag{1}
D D ∂ t ∂ U U + ∂ x ∂ F F = S S ( 1 ) U \pmb{U} U U F \pmb{F} F F S \pmb{S} S S
D = [ B 0 0 1 ] , U = [ Z Q ] , F ( U ) = [ f 1 f 2 ] = [ Q Q 2 A ] , S = [ q − g A ∂ Z ∂ x − g A S f ] (2)
\pmb{D} = \begin{bmatrix}B&0 \\0&1\end{bmatrix},\pmb{U} = \begin{bmatrix}Z\\ Q\end{bmatrix},\pmb{F}(\pmb{U}) = \begin{bmatrix}f1\\ f2\end{bmatrix}=\begin{bmatrix}Q\\ \frac{Q^2}{A}\end{bmatrix},\pmb{S} = \begin{bmatrix}q\\ -gA\frac{\partial Z}{\partial x}-gAS_f\end{bmatrix}
\tag{2}
D D = [ B 0 0 1 ] , U U = [ Z Q ] , F F ( U U ) = [ f 1 f 2 ] = [ Q A Q 2 ] , S S = [ q − g A ∂ x ∂ Z − g A S f ] ( 2 ) B B B Z Z Z Q Q Q m 3 / s \text{m}^3/\text{s} m 3 / s A A A m 2 \text{m}^2 m 2 f 1 f1 f 1 f 2 f2 f 2 F ( U ) \pmb{F}(\pmb{U}) F F ( U U ) q q q m 2 / s \text{m}^2/\text{s} m 2 / s g g g m / s 2 \text{m}/\text{s}^2 m / s 2 t t t s f s_f s f S f = ( n 2 Q ∣ Q ∣ ) / ( A 2 R 4 / 3 ) S_f=(n^2Q|Q|)/(A^2R^{4/3}) S f = ( n 2 Q ∣ Q ∣ ) / ( A 2 R 4/3 ) R R R n n n
考虑到水面坡度变化一般情况下比河道底坡变化平缓,因此在源项部分采用水面坡度项代表压力项的影响,有利于数值格式的稳定。此外,采用该形式也能避免不当的底坡项离散方法平衡数值通量时带来的计算格式不守恒问题1
2. 数值格式
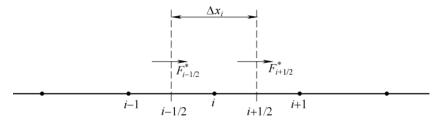
GRMS 一维河网模型采用有限体积法离散控制方程,将水位、流量等水力要素信息存储在计算单元中心(即河道断面上)。将公式(1)在单元i i i
U i n + 1 = U i n − Δ t Δ x i ( F i + 1 / 2 ∗ − F i − 1 / 2 ∗ ) + Δ t D i − 1 S i (3)
\pmb{U}_{i}^{n+1}=\pmb{U}_{i}^{n}-\frac{\Delta t}{\Delta x_i}(\pmb{F}_{i+1/2}^{*}-\pmb{F}_{i-1/2}^{*})+\Delta t \pmb{D}_{i}^{-1} \pmb{S}_i
\tag{3}
U U i n + 1 = U U i n − Δ x i Δ t ( F F i + 1/2 ∗ − F F i − 1/2 ∗ ) + Δ t D D i − 1 S S i ( 3 ) U i \pmb{U}_i U U i i i i F i + 1 / 2 ∗ \pmb{F}_{i+1/2}^{*} F F i + 1/2 ∗ F i − 1 / 2 ∗ \pmb{F}_{i-1/2}^{*} F F i − 1/2 ∗ i i i Δ x i \Delta x_i Δ x i i i i Δ t \Delta t Δ t S i \pmb{S}_i S S i i i i
图1 一维中心格式有限体积法单元示意图
经过离散后,式(3)中的连续方程变为:
Z i n + 1 = Z i n − 1 B i Δ t Δ x i [ ( f 1 ) i + 1 / 2 ∗ − ( f 1 ) i − 1 / 2 ∗ ] (4)
\pmb{Z}_{i}^{n+1}=\pmb{Z}_{i}^{n}-\frac{1}{B_i}\frac{\Delta t}{\Delta x_i}[(f_1)_{i+1/2}^{*}-(f_1)_{i-1/2}^{*}]
\tag{4}
Z Z i n + 1 = Z Z i n − B i 1 Δ x i Δ t [( f 1 ) i + 1/2 ∗ − ( f 1 ) i − 1/2 ∗ ] ( 4 ) Q Q Q f 1 f_1 f 1 2 f 1 f_1 f 1 f 1 f_1 f 1 Q Q Q Q Q Q
2.1. HLL 格式的近似 Riemann 解
对界面通量采用 HLL(Harten, Lax, van Leer)格式近似 Riemann 解进行计算,通量求解过程如下:
F ∗ = { F ( U L ) if s L ≥ 0 F L R = [ B R s R f 1 L − B L s L f 1 R + B L s L B R s R ( Z R − Z L ) B R s R − B L s L , s R f 2 L − s L f 2 R + s L s R ( Q R − Q L ) s R − s L ] T if s L < 0 < s R F ( U R ) if s R ≤ 0 (5)
\pmb{F}^* =
\left\{\begin{matrix}
\pmb{F}(\pmb{U}_L) & \text{ if } s_{L}\geq0
\\ \pmb{F}_{LR}=\begin{bmatrix}\frac{B_{R}s_{R}f_{1}^{L}-B_{L}s_{L}f_{1}^{R}+B_{L}s_{L}B_{R}s_{R}(Z_{R}-Z_{L})}{B_{R}s_{R}-B_{L}s_{L}},\frac{s_{R}f_{2}^{L}-s_{L}f_{2}^{R}+s_{L}s_{R}(Q_{R}-Q_{L})}{s_{R}-s_{L}} \end{bmatrix}^{\text{T}} & \text{ if } s_{L}<0<s_{R}
\\ \pmb{F}(\pmb{U}_{R}) & \text{ if } s_{R}\leq0
\end{matrix}\right.
\tag{5}
F F ∗ = ⎩ ⎨ ⎧ F F ( U U L ) F F L R = [ B R s R − B L s L B R s R f 1 L − B L s L f 1 R + B L s L B R s R ( Z R − Z L ) , s R − s L s R f 2 L − s L f 2 R + s L s R ( Q R − Q L ) ] T F F ( U U R ) if s L ≥ 0 if s L < 0 < s R if s R ≤ 0 ( 5 ) s L s_L s L s R s_R s R s L ≥ 0 s_L\geq0 s L ≥ 0 s R ≤ 0 s_R\leq0 s R ≤ 0 s L < 0 < s R s_L<0<s_R s L < 0 < s R
2.2. Riemann 状态的非负重构
采用 MUSCL 线性重构方法对界面左右两侧的变量进行数值重构,其表达式为:
U i + 1 / 2 , L = U i + 0.5 ϕ i ( U i − U i − 1 ) , U i + 1 / 2 , R = U i + 1 − 0.5 ϕ i + 1 ( U i + 1 − U i ) (6)
\pmb{U}_{i+1/2,L}=\pmb{U}_{i}+0.5\phi_{i}(\pmb{U}_{i}-\pmb{U}_{i-1}),\pmb{U}_{i+1/2,R}=\pmb{U}_{i+1}-0.5\phi_{i+1}(\pmb{U}_{i+1}-\pmb{U}_{i})
\tag{6}
U U i + 1/2 , L = U U i + 0.5 ϕ i ( U U i − U U i − 1 ) , U U i + 1/2 , R = U U i + 1 − 0.5 ϕ i + 1 ( U U i + 1 − U U i ) ( 6 ) ϕ \phi ϕ
h i + 1 / 2 , L = h i + 0.5 ϕ i ( h i − h i − 1 ) , h i + 1 / 2 , R = h i + 1 − 0.5 ϕ i + 1 ( h i + 1 − h i ) (7)
h_{i+1/2,L}=h_{i}+0.5\phi_{i}(h_{i}-h_{i-1}),h_{i+1/2,R}=h_{i+1}-0.5\phi_{i+1}(h_{i+1}-h_{i})
\tag{7}
h i + 1/2 , L = h i + 0.5 ϕ i ( h i − h i − 1 ) , h i + 1/2 , R = h i + 1 − 0.5 ϕ i + 1 ( h i + 1 − h i ) ( 7 ) A A A A i + 1 / 2 , L A_{i+1/2,L} A i + 1/2 , L A i + 1 / 2 , R A_{i+1/2,R} A i + 1/2 , R u i + 1 / 2 , L u_{i+1/2,L} u i + 1/2 , L u i + 1 / 2 , R u_{i+1/2,R} u i + 1/2 , R ( Z b ) i + 1 / 2 , L (Z_b)_{i+1/2,L} ( Z b ) i + 1/2 , L ( Z b ) i + 1 / 2 , R (Z_b)_{i+1/2,R} ( Z b ) i + 1/2 , R i + 1 / 2 i+1/2 i + 1/2
( Z b ) i + 1 / 2 = max ( ( Z b ) i + 1 / 2 , L , ( Z b ) i + 1 / 2 , R ) (8)
(Z_b)_{i+1/2}=\text {max}((Z_b)_{i+1/2,L},(Z_b)_{i+1/2,R})
\tag{8}
( Z b ) i + 1/2 = max (( Z b ) i + 1/2 , L , ( Z b ) i + 1/2 , R ) ( 8 ) ( Z b ) i + 1 / 2 (Z_b)_{i+1/2} ( Z b ) i + 1/2
h ∼ i + 1 / 2 , L = max ( 0 , Z i + 1 / 2 , L − ( Z b ) i + 1 / 2 ) h ∼ i + 1 / 2 , R = max ( 0 , Z i + 1 / 2 , R − ( Z b ) i + 1 / 2 ) (9)
\stackrel{\sim}{h}_{i+1/2,L}=\text {max}(0,{Z}_{i+1/2,L}-(Z_b)_{i+1/2})\\
\stackrel{\sim}{h}_{i+1/2,R}=\text {max}(0,{Z}_{i+1/2,R}-(Z_b)_{i+1/2})
\tag{9}
h ∼ i + 1/2 , L = max ( 0 , Z i + 1/2 , L − ( Z b ) i + 1/2 ) h ∼ i + 1/2 , R = max ( 0 , Z i + 1/2 , R − ( Z b ) i + 1/2 ) ( 9 ) A ∼ i + 1 / 2 , L \stackrel{\sim}A_{i+1/2,L} A ∼ i + 1/2 , L A ∼ i + 1 / 2 , R \stackrel{\sim}A_{i+1/2,R} A ∼ i + 1/2 , R
Z ∼ i + 1 / 2 , L = h ∼ i + 1 / 2 , L + ( Z b ) i + 1 / 2 ) , Z ∼ i + 1 / 2 , R = h ∼ i + 1 / 2 , R + ( Z b ) i + 1 / 2 ) Q ∼ i + 1 / 2 , L = u i + 1 / 2 , L A ∼ i + 1 / 2 , L , Q ∼ i + 1 / 2 , R = u i + 1 / 2 , R A ∼ i + 1 / 2 , R (10)
\stackrel{\sim}{Z}_{i+1/2,L}=\stackrel{\sim}h_{i+1/2,L}+(Z_b)_{i+1/2}),
\stackrel{\sim}{Z}_{i+1/2,R}=\stackrel{\sim}h_{i+1/2,R}+(Z_b)_{i+1/2})\\
\stackrel{\sim}{Q}_{i+1/2,L}=u_{i+1/2,L}\stackrel{\sim}A_{i+1/2,L},
\stackrel{\sim}{Q}_{i+1/2,R}=u_{i+1/2,R}\stackrel{\sim}A_{i+1/2,R}
\tag{10}
Z ∼ i + 1/2 , L = h ∼ i + 1/2 , L + ( Z b ) i + 1/2 ) , Z ∼ i + 1/2 , R = h ∼ i + 1/2 , R + ( Z b ) i + 1/2 ) Q ∼ i + 1/2 , L = u i + 1/2 , L A ∼ i + 1/2 , L , Q ∼ i + 1/2 , R = u i + 1/2 , R A ∼ i + 1/2 , R ( 10 ) 3
Δ Z = max ( 0 , ( Z b ) i + 1 / 2 − Z i + 1 / 2 , L ) (11)
\Delta Z=\text{max}(0,(Z_b)_{i+1/2}-Z_{i+1/2,L})
\tag{11}
Δ Z = max ( 0 , ( Z b ) i + 1/2 − Z i + 1/2 , L ) ( 11 )
( Z b ) i + 1 / 2 ← ( Z b ) i + 1 / 2 − Δ Z , Z ∼ i + 1 / 2 , L ← Z ∼ i + 1 / 2 , L − Δ Z , Z ∼ i + 1 / 2 , R ← Z ∼ i + 1 / 2 , R − Δ Z (12)
(Z_b)_{i+1/2}\leftarrow(Z_b)_{i+1/2}-\Delta Z,\\
\stackrel{\sim}Z_{i+1/2,L}\leftarrow\stackrel{\sim}Z_{i+1/2,L}-\Delta Z,
\stackrel{\sim}Z_{i+1/2,R}\leftarrow\stackrel{\sim}Z_{i+1/2,R}-\Delta Z
\tag{12}
( Z b ) i + 1/2 ← ( Z b ) i + 1/2 − Δ Z , Z ∼ i + 1/2 , L ← Z ∼ i + 1/2 , L − Δ Z , Z ∼ i + 1/2 , R ← Z ∼ i + 1/2 , R − Δ Z ( 12 ) i + 1 / 2 i+1/2 i + 1/2 F i + 1 / 2 ∗ \pmb{F}_{i+1/2}^{*} F F i + 1/2 ∗ i − 1 / 2 i-1/2 i − 1/2 F i − 1 / 2 ∗ \pmb{F}_{i-1/2}^{*} F F i − 1/2 ∗ U i n + 1 / 2 = U i n − 1 2 Δ t Δ x i D i − 1 [ F i + 1 / 2 ∗ ( U i + 1 / 2 n ) − F i − 1 / 2 ∗ ( U i − 1 / 2 n ) ] U i n + 1 = U i n − Δ t Δ x i D i − 1 [ F i + 1 / 2 ∗ ( U i + 1 / 2 n + 1 / 2 ) − F i − 1 / 2 ∗ ( U i − 1 / 2 n + 1 / 2 ) ] + Δ t D i − 1 S i (13)
\pmb{U}_{i}^{n+1/2}=\pmb{U}_{i}^{n}-\frac{1}{2}\tfrac{\Delta t}{\Delta x_i}\pmb{D}_{i}^{-1}[\pmb{F}_{i+1/2}^{*}(\pmb{U}_{i+1/2}^{n})-\pmb{F}_{i-1/2}^{*}(\pmb{U}_{i-1/2}^{n})]\\
\pmb{U}_{i}^{n+1}=\pmb{U}_{i}^{n}-\tfrac{\Delta t}{\Delta x_i}\pmb{D}_{i}^{-1}[\pmb{F}_{i+1/2}^{*}(\pmb{U}_{i+1/2}^{n+1/2})-\pmb{F}_{i-1/2}^{*}(\pmb{U}_{i-1/2}^{n+1/2})]+\Delta {t}\pmb{D}_{i}^{-1}\pmb{S}_{i}
\tag{13}
U U i n + 1/2 = U U i n − 2 1 Δ x i Δ t D D i − 1 [ F F i + 1/2 ∗ ( U U i + 1/2 n ) − F F i − 1/2 ∗ ( U U i − 1/2 n )] U U i n + 1 = U U i n − Δ x i Δ t D D i − 1 [ F F i + 1/2 ∗ ( U U i + 1/2 n + 1/2 ) − F F i − 1/2 ∗ ( U U i − 1/2 n + 1/2 )] + Δ t D D i − 1 S S i ( 13 ) U i + 1 / 2 n + 1 / 2 \pmb{U}_{i+1/2}^{n+1/2} U U i + 1/2 n + 1/2 U i − 1 / 2 n + 1 / 2 \pmb{U}_{i-1/2}^{n+1/2} U U i − 1/2 n + 1/2
2.3. 源项处理
源项包括水面梯度项和摩阻项。摩阻项直接采用显格式处理。对于水面梯度项,为了保持数值解的光滑性,采用空间 MUSCL 数值重构后的水位来计算水面梯度,表达式如下:
∂ Z ∂ x i = Z ‾ i + 1 / 2 − Z ‾ i − 1 / 2 Δ x i (14)
\frac{\partial{Z}}{\partial{x_i}}=\frac{\overline{Z}_{i+1/2}-\overline{Z}_{i-1/2}}{\Delta{x_i}}
\tag{14}
∂ x i ∂ Z = Δ x i Z i + 1/2 − Z i − 1/2 ( 14 ) Z ‾ i + 1 / 2 = ( Z ∼ i + 1 / 2 , L + Z ∼ i + 1 / 2 , R ) / 2 \overline{Z}_{i+1/2}=(\stackrel{\sim}{Z}_{i+1/2,L}+\stackrel{\sim}{Z}_{i+1/2,R})/2 Z i + 1/2 = ( Z ∼ i + 1/2 , L + Z ∼ i + 1/2 , R ) /2 Z ‾ i − 1 / 2 = ( Z ∼ i − 1 / 2 , L + Z ∼ i − 1 / 2 , R ) / 2 \overline{Z}_{i-1/2}=(\stackrel{\sim}{Z}_{i-1/2,L}+\stackrel{\sim}{Z}_{i-1/2,R})/2 Z i − 1/2 = ( Z ∼ i − 1/2 , L + Z ∼ i − 1/2 , R ) /2
2.4 边界条件与干河床处理
在边界外部引入一个镜像单元,其断面形状与相邻边界单元相同。对于水位边界,镜像单元的水位值等于给定的水位边界值,流量值与相邻的边界单元流量值相同;对于流量边界,镜像单元的流量值等于给定的流量边界值,水位值与相邻的边界单元水位值相同;对于水位-流量边界,镜像单元的水位、流量值分别等于给定的水位边界值和流量边界值;对于开边界,镜像单元的水位、流量值均与相邻边界单元的水位、流量值相同。
模型可能会对干河床情况进行模拟,通常可以在单元上定义一个足够小的水深,并使流速为零,这样干单元可按照求解湿单元的方法进行计算,不至于引起较大误差。
2.5 时间步长
时间步长受限于 CFL(Courant-Friedrichs-Lewy)稳定性条件:
N CFL = max [ Δ t C Δ x i ( ∣ u i ∣ + g A i / B i ) ] ≤ 1 if 1 ≤ i ≤ N (15)
N_{\text{CFL}}=\text{max}[\frac{\Delta t}{C\Delta x_i}(|u_i|+\sqrt{gA_i/B_i})]\leq1 \quad \text{ if } 1\leq i\leq N
\tag{15}
N CFL = max [ C Δ x i Δ t ( ∣ u i ∣ + g A i / B i )] ≤ 1 if 1 ≤ i ≤ N ( 15 ) C C C N N N
3. 汊点
3.1. 汊点约束方程
对于天然河网来说,河段的两个端点不是外边界点,就是汊点,在模型计算时,外边界的水力要素过程(水位、流量)已知,只需确定汊点处的水力要素值,即可进行河道下一时刻的模拟。实际上汊点连接关系通过连接河段边界节点变量实现河段间的水动力过程耦合,故汊点连接关系可以为各河段提供边界条件,即“汊点内边界条件”。汊点处水量守恒关系和能量守恒关系如下:
∑ i = 1 M Q i = 0 (16)
\sum_{i=1}^{M}Q_i=0
\tag{16}
i = 1 ∑ M Q i = 0 ( 16 ) Z 1 = Z 2 = . . . = Z i = . . . = Z M (17)
Z_1=Z_2=...=Z_i=...=Z_M
\tag{17}
Z 1 = Z 2 = ... = Z i = ... = Z M ( 17 ) M M M Q i Q_i Q i Z i Z_i Z i i i i C ± : d x / d t = u ± c \text{C}_{\pm}:\text{d}x/\text{d}t=u\pm{c} C ± : d x / d t = u ± c D ( u ± 2 c ) / D t = − g ( S f − S 0 ) (18)
\text{D}(u\pm{2c})/\text{D}t=-g(S_{f}-S_{0})
\tag{18}
D ( u ± 2 c ) / D t = − g ( S f − S 0 ) ( 18 ) u u u c c c S 0 = − d Z b / d x S_{0}=-\text{d}Z_b/\text{d}x S 0 = − d Z b / d x
3.2. 汊点水位迭代法
汊点水位迭代法的核心思想是在汊点处给定水位边界条件,对每个河道单独求解,然后利用各河道求解结果对汊点水位边界条件进行校正,反复迭代直至汊点连接条件在误差允许范围内得到满足。根据陈永灿等4
Z j 2 − Z j 1 = Δ Z j = ( ∑ i = 1 M i n Q j , i − ∑ i = 1 M o u t Q j , i ) / ( α M B j ‾ g h j ) (19)
Z_{j}^{2}-Z_{j}^{1}=\Delta Z_{j}=(\sum_{i=1}^{M_{in}}Q_{j,i}-\sum_{i=1}^{M_{out}}Q_{j,i})/(\alpha M\overline{B_j} \sqrt{gh_{j}})
\tag{19}
Z j 2 − Z j 1 = Δ Z j = ( i = 1 ∑ M in Q j , i − i = 1 ∑ M o u t Q j , i ) / ( α M B j g h j ) ( 19 ) Z j 1 Z_j^1 Z j 1 Z j 2 Z_j^2 Z j 2 Δ Z \Delta Z Δ Z ∑ i = 1 M i n Q j , i \sum_{i=1}^{M_{in}}Q_{j,i} ∑ i = 1 M in Q j , i ∑ i = 1 M o u t Q j , i \sum_{i=1}^{M_{out}}Q_{j,i} ∑ i = 1 M o u t Q j , i M M M B j ‾ \overline{B_j} B j h j h_j h j α \alpha α α \alpha α
由式(19)可知,当预测的汊点水位偏低,导致流入汊点水量大于流出汊点水量时,汊点水位校正量大于0,使校正后的汊点水位升高,进而减少流入汊点的水量、增多流出汊点的水量;反之亦然。因此,上述的汊点水位迭代法是收敛的。
参考文献
1 . 张大伟, 权锦, 马建明, 等. 应用Godunov格式模拟复杂河网明渠水流运动[J]. 应用基础与工程科学学报,2015,23(6):1088-1096 ↩
2 . Ying X Y, Sam S Y, Wang F A P. Improved implementation of the HLL approximate Riemann solver for one-dimensional open channel flows[J]. Journal of Hydraulic Research,2008,46(1):21-34 ↩
3 . Liang Q. Flood simulation using a well-balanced shallow flow model[J]. ASCE J Hydraul Eng,2010,136(9):69-75 ↩
4 . 陈永灿, 王智勇, 朱德军, 刘昭伟, 等. 一维河网非恒定渐变流计算的汊点水位迭代法及其应用[J]. 水力发电学报,2010,29(4):140-147 ↩